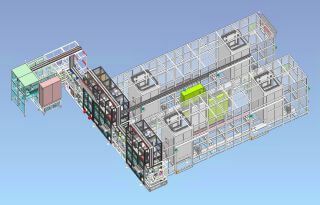
設備に投入されたワークにプローブで電源を供給し、工業用PCを用いてプログラムを書き込みます。
プログラム書込み後のワークを直交ロボットでパレットへ移載し、コンベア搬送で検査工程まで運びます。
検査工程では直交ロボットでワークを治具に移載し、工業用PCを用いてプログラムに沿ってモーターを動作させ、ワークの載った治具を縦・横方向に回転させながら走行軸上のターゲットに対して検査を行います。
製品事例詳細PRODUCT
DETAILS
絞り込み
LiDAR検査装置LiDAR Inspection Machine
「絞り込み」をもう一度タップで閉じる